Sistem navigasi memberikan perkiraan posisi, kecepatan, dan orientasi/attitude pesawat secara teratur (pada kecepatan sampling tertentu). Kuantitas ini (posisi, kecepatan, dan attitude) adalah perkiraan kuantitas sebenarnya (true values) akibat dari random noise yang selalu ada dalam setiap pengukuran (measurement noise). Oleh karena noise ini, kuantitas hasil perhitungan dari sistem navigasi mengandung random error. Artinya, posisi yang dilaporkan oleh suatu sistem navigasi, -misalnya posisi hasil perhitungan GPS-, bukanlah posisi sesungguhnya di mana pesawat/kendaraan itu berada.
Seberapa jauh perbedaan antara lokasi hasil perhitungan suatu sistem navigasi dengan lokasi sesungguhnya, di mana sistem tersebut berada, tergantung dari tingkat pengukuran (level measurement) noise pada sistem navigasi tersebut. Akurasi pengukuran pseudorange pada GPS misalnya dipengaruhi oleh atmospheric error (troposphere dan ionosphere delay), multipath error akibat pantulan signal, signal interference, thermal noise, dan lain sebagainya.
Agar suatu sistem navigasi dapat diterapkan, error pada sistem tersebut harus dipelajari dengan baik (karakterisasi). Tidak hanya sumber-sumber yang menyebabkan random error yang dipelajari dan dikarakterisasi, tapi juga harus mempelajari bagaimana menyatakan error tersebut pada kuantitas yang dihitung oleh sistem navigasi.
Contoh paling sederhana adalah sistem navigasi yang menghitung lokasi suatu platform (misalnya pesawat) dengan menggunakan pengukuran jarak ke beberapa beacon. Permasalahan ini umumnya dikenal dengan istilah triangulation karena untuk menentukan lokasi suatu pesawat tanpa ambigu, butuh paling sedikit tiga beacon. Beacon ini bisa berupa stasiun pemancar DME, satelit GPS, atau pseudollite.

Secara matematis, posisi pesawat dapat dihitung dengan menggunakan metode least square. Artinya, posisi pesawat diperkirakan sebagai sebuah posisi dengan perbedaan minimal antara perkiraan posisi dan posisi aktual/sebenarnya.
di mana ![]() adalah perkiraan posisi yang dihitung oleh sistem navigasi dan x adalah posisi sebenarnya. Proses minimisasi dihitung secara statistik (menggunakan nilai ekspektasi atau rata-rata). Secara eksplisit, dapat dituliskan:
adalah perkiraan posisi yang dihitung oleh sistem navigasi dan x adalah posisi sebenarnya. Proses minimisasi dihitung secara statistik (menggunakan nilai ekspektasi atau rata-rata). Secara eksplisit, dapat dituliskan:

di mana ρ menunjukkan pengukuran jarak (range measurement) dari receiver di pesawat ke beacon tersebut.
Matrix H dikenal sebagai geometry matrix karena elemen di dalam matrix tersebut menunjukkan line-of-sight dari beacon ke pesawat. Matriks ini menentukan proyeksi error pada pengukuran range ρ1, ρ2 , ρ3, … Sebagai contoh, dua ilustrasi di bawah ini menggambarkan bagaimana geometri yang berbeda menghasilkan penyebaran error yang berbeda. Pada kedua ilustrasi ini, lokasi pesawat sebenarnya digambarkan dengan titik merah. Ketiga stasiun pemancar DME digambarkan dengan titik hitam. Kumpulan titik biru menggambarkan hasil perhitungan sistem navigasi yang menggunakan range measurement dari ketiga stasiun DME ini. Setiap titik biru menunjukkan hasil perhitungan individual setiap realisasi random error pada range measurement. Dalam kedua skenario ini, 5000 sampel range measurement disimulasikan untuk mendapatkan penyebaran (distribusi) error dari perkiraan posisi.


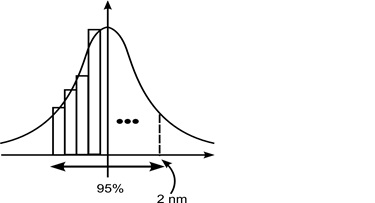
Penyebaran error dari perkiraan posisi (position error distribution) menunjukkan tingkat akurasi suatu sistem navigasi. Penyebaran ini dapat dikuantifikasi dengan menyatakan nilai baku (standard) dari deviasi penyebaran tersebut. Angka yang sering dipakai adalah 95% accuracy level. Artinya, untuk konfigurasi yang sama, 95% dari seluruh hasil perhitungan sistem navigasi tersebut memiliki error di bawah angka yang dilaporkan. Contohnya, apabila sistem tersebut melaporkan 95% accuracy dari sistem tersebut adalah 2 nm, hanya 5 dari 100 kali sistem navigasi tersebut ditempatkan di posisi yang sama (pada kondisi yang sama) akan menghasilkan error di luar 2 nm. Kuantitas lain yang ekuivalen adalah CEP (circular error probable).
Tingkat akurasi ini dibutuhkan untuk proses sertifikasi dari suatu sistem navigasi sebelum digunakan dalam operasi. Angka ini diperoleh dengan menggunakan metode statistik (analitik atau monte carlo simulation) yang dibuktikan/verifikasi dengan pengumpulan data aktual. Data dikumpulkan dan histogram yang menunjukkan penyebaran error yang dihasilkan oleh sistem navigasi tersebut digunakan untuk menentukan tingkat akurasi sistem navigasi tersebut. Misalnya tingkat akurasi 95% diperoleh dengan menganalisa error maksimum pada 95% dari populasi tersebut. Untuk menentukan tingkat akurasi dari suatu sistem navigasi dengan akurat, diperlukan sampel yang cukup besar.